Today’s Ask Torsen entry comes to us by email from HMMWV owner Adam. He asks:
Hello,
I have been reviewing how the Torsen T-1 front and rear differential functions off road. I myself have the differential in my ’94 Humvee. My confusion in the diff comes from the Torque Biasing Ratio and what exactly is meant by a 4.5:1 ratio. I have read that it is the amount of torque that the diff can handle and still remained locked.
I’ll [phrase] my question [as] a scenario:
One wheel is on a low traction surface I.E. a wet rock. The other wheel is on a high traction surface. Let’s say the first wheel is getting 100 units of torque and the other wheel is getting 450 units of torque.
What exactly happens when the wheel with high traction starts to exceed 450 units of torque? Does the diff become an open diff and lose all of its locking abilities? If the wheel that exceeded 450 units of torque is now getting 500 units of torque, what exactly is the output? None? OR can the diff simply not accommodate the extra torque so even though I may be sending 600 units of torque in, the diff is only sending 100 units one way and 450 units the other way? And then the diff itself is absorbing the extra 50 lb-ft?
I’m inquiring because I was talking to a person about air lockers and how technically their TBR is infinity:1 which means that the Torsen can’t compare because it can’t theoretically send infinite torque to the high traction wheel?
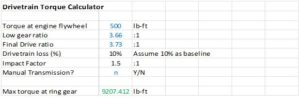
On a side note, how does the differential ring gear ratio interact with the TBR? The input torque is multiplied by the ring gear ratio then divided by the TBR, correct?
Sincerely,
Adam
Adam,
Thanks for contacting Torsen. The simplest way to conceptualize torque bias ratio (TBR) is to think of it as a traction ratio. This represents how much difference is allowed from one side to the other; if the TBR level is exceeded, the differential will “open” and allow spin or differentiation to occur. If the ratio of traction from one side to the other is less than the TBR, the differential will remain locked up. For example, if the TBR is 4:1, differentiation (or spin) will not happen unless your low-traction tire has less than a ¼ of the traction that the high-traction tire has.
Limited slip differentials (LSDs), like Torsen, operate by generating friction internally while under load. That friction provides resistance to the tendency for one tire to slip. Different types of LSDs do this in different manners; traditional “posi” units do so with clutches. Helical gear differentials (like Torsen) do so by creating friction using forces generated by their gears. A differential’s TBR rating is a product of how much friction is created inside.
Another way to think about TBR is this: it also represents the maximum distribution ratio of torque from side to side. This ties into your locker question; the simple formula is that the high traction tire receives (up to) whatever amount the low-traction side can sustain, multiplied by TBR. So, T(high) = T(low) X TBR. This does necessarily mean that the Torsen requires some amount of reaction torque on both outputs to be able to act against. This is typically the result of tire contact with the ground.
You probably see by now that in extreme situations, such as when a tire is lifted off the ground completely, that zero X TBR is still = zero. So, yes, in that case, the Torsen is limited. But that is why the product is classified as a limited slip differential. However, keep in mind that I said that the Torsen requires some reaction load on both sides to work against. Though that typically is tire traction reaction, that is not the only means of providing a reaction torque; it can quite readily come from the brake system. The vehicle’s brakes are quite capable of providing negative torque to the axle for the differential to work against. In fact, the military at least used to train HMMWV drivers to use a technique called brake modulation to do exactly that (though I don’t know if that’s still the practice).
Conversely, in order to prevent an extreme situation, such as lifting a tire, from causing a complete lack of traction, the vehicle would need to have an actual locking differential. Lockers have, as your friend stated, essentially an infinite:1 TBR. They are capable of sending 100% of available torque to either tire. Instead of creating internal friction to resist slip, lockers usually have some sort of element that provides a direct, physical impediment to slip. This can be engaging a spline or a dog clutch, or maybe use of a ratcheting one-way clutch to drive. With that said, there are a lot of other compromises that come with a locking differential, such as compromising vehicle maneuverability.
Regarding final drive ratio, it doesn’t really have any bearing on TBR. The ring and pinion impacts how much the prop shaft torque is multiplied by when it is applied to the differential, but that’s its only real involvement.
So, regarding your example – I’ll take you through a few scenarios so you can see the torque interaction at play. Your differential has a TBR of 4.5:1, and we’ll say there is potentially 200 lb-ft of torque coming out of your transmission & transfer case on the rear prop shaft. For this example, the axle has a 3:1 ring & pinion ratio. So, that can represent where the 600 lb-ft you used comes from.
Scenario 1) Now, if both tires can sustain 300 lb-ft of torque (each) before breaking loose, the differential takes the 600 lb-ft and divides it to each side evenly, without any differentiation occurring. So, 300 lb-ft is delivered to each tire (I’m ignoring the HMMWV’s hub reduction gearing here). In this case, both tires are maximized in terms of traction, but are just shy of their slipping point.
Scenario 2) If, instead, both tires can handle 450 lb-ft before they slip, the torque distribution is still going to be essentially 50/50, with 300 lb-ft going to both sides. The difference is that the tires are comfortably below their slip limits.
Scenario 3) This time, one tire (from scenario 2) suddenly encounters a drop in traction and falls off to, say, 150 lb-ft, the Torsen will immediately take that 150 and try to multiply by its TBR. This could allow the differential to send up to 675 lb-ft to the high-traction tire – if there was enough torque going to the axle to support that. But in this case there isn’t, since we only have 600 lb-ft total, so only 450 are available to send to the high-traction side. Coincidentally, we said that 450 lb-ft was the tire’s traction limit, so again we’re maximizing the traction of both tires and no differentiation has occurred.
Scenario 4) Now, let’s say that farther down the trail, a tire encounters another low traction spot. This time, the tire traction will only support 100 lb-ft of torque. Again, the differential will immediately bias torque to the high traction side, within its TBR limits. So, the low-traction side only receives 100-lb-ft, and the differential again multiplies that and delivers 450 lb-ft to the high-traction side. Again, the high-traction tire is receiving its maximum torque before it would slip. However, as you noted, 450 + 100 = 550. So, where is the missing 50 lb-ft?
The answer to that, and what follows, is up to the driver. If you happened to notice that the trail was slippery in spots after going through scenario #3, maybe you backed off of the throttle a little bit and allowed the torque going to the axle to drop a little. In which case, maybe the torque is reduced down to (or below) the new 550 lb-ft threshold. If so, again, the tires are traction maximized and the truck carries on. No slippage or differentiation has occurred.
On the other hand, if you stayed on the throttle right through it – and this gets to the heart of your question – it becomes a different story. Torque, like other areas of physics, is based on having an equal and opposite reaction. The axle’s total traction limit remains 550 lb-ft. Consequently, the torque load going into the axle cannot exceed the traction that supports it. So, that extra 50 lb-ft disappears, or more specifically it ceases to exist. The system torque drops, at least until traction is regained and all is right with the world.
If you continue to try to add more power at that point, you will basically turn the excess power into wheel spin. Differentiation occurs, and if the resulting unloading is sufficient to let the engine rev up, it turns to excessive tire spin. However, even while that is happening, the Torsen is still sending 450 lb-ft to the high-traction side, as long as the low-traction side can still manage its 100 lb-ft. So, you still move forward.
Scenario 5) This time, you actually lift a tire off of the ground, maybe while traversing a ditch. As we said above, a tire in the air can support zero torque, and zero multiplied by 4.5 still equals zero. But here, you can apply a little bit of pressure to the brake pedal, so you generate a brake load of, say, 100 lb-ft. The Torsen works off of the brake load just like it would a traction load, and then Scenario 4 is essentially repeated. This time, though, because you have your foot on the brake, you’re not as likely to spin up the low-traction tire.
Scenario 6) In one last situation, let’s say that scenario #3 is repeated, except this time, the high-traction tire has a limit of only 400 lb-ft before it slips. Again, the Torsen would want to send up to 450 lb-ft to it, but that exceeds the tire’s traction ability. This time, if you stay on the gas, you run the risk of causing both tires to break traction and spin. In this case, both tires are potentially going to be overpowered. The differential is still working to try to balance the torque load to the tires’ traction limitations, but unless you reduce driveline torque, you cause both to saturate and break free.
Ultimately, everything comes down to tire traction. Torsen works to try to maximize the tires’ effectiveness up to the point where slip begins, though it does have some limitations. I know that’s a fairly lengthy answer to what probably seems like a basic question, but it’s important to understand the different situations that could occur in order to explain what happens in one specific one.